
| ที่มา | คิดเป็นเทคโนฯ |
|---|---|
| ผู้เขียน | จิรวรรณ โรจนพรทิพย์ |
| เผยแพร่ |
สืบเนื่องจาก มหาวิทยาลัยเกษตรศาสตร์ได้รับมอบหมายจากรัฐบาลให้จัดทำโครงการเกษตร อาหารและเทคโนโลยีชีวภาพ โดยมีเป้าหมายเพื่อมุ่งพัฒนาและเตรียมความพร้อมของเกษตรกร รวมไปถึงบุคลากรทางด้านเกษตรก้าวเข้าสู่ยุค “การเกษตร 4.0” ตามร่างยุทธศาสตร์ชาติ 20 ปี ที่เน้นการขับเคลื่อนภาคการเกษตรด้วยนวัตกรรมและเทคโนโลยีบูรณาการร่วมกับองค์ความรู้ในด้านต่างๆ ซึ่งภารกิจนี้จะเป็นการพลิกโฉมภาคการเกษตรของประเทศไทยไปสู่ความมั่งคั่งทางอาหารและการเกษตรอย่างยั่งยืน

โครงการเกษตร อาหารและเทคโนโลยีชีวภาพ ยุคไทยแลนด์ 4.0 ประกอบไปด้วยหลายกิจกรรม และโครงการย่อย ทางมหาวิทยาลัยเกษตรศาสตร์ได้มอบหมายให้ อาจารย์ปัญญา เหล่าอนันต์ธนา ผู้ช่วยอธิการบดีฝ่ายกิจการนิสิต และอาจารย์ประจำคณะวิศวกรรมศาสตร์ สาขาวิศวกรรมไฟฟ้า มหาวิทยาลัยเกษตรศาสตร์ คิดค้นนวัตกรรมเครื่องจักรที่ช่วยเพิ่มประสิทธิภาพและเพิ่มผลผลิตทางการเกษตร
ซึ่งเป็นที่มาของ โครงการ “3D RoboFarmer” ที่มุ่งวิจัยพัฒนา “หุ่นยนต์ 3 มิติ สําหรับการเกษตรแบบผสมผสานด้วยความแม่นยําสูง” เป็นงานวิจัยที่ตอบโจทย์การปฏิรูปเครื่องมือทำการเกษตรและวางรูปแบบแปลงเกษตรด้วยแนวคิดใหม่ที่มีจุดเด่นเหนือกว่าทุกระบบในปัจจุบัน และมีความสามารถในการแบกน้ำหนักเครื่องจักรขนาดใหญ่เข้าไปทำงานในแปลงการเกษตรได้ด้วยการเคลื่อนบนระบบเครน แบบ Cartesian (XYZ) โครงการนี้ประยุกต์ใช้องค์ความรู้ทางด้านวิศวกรรมและทางด้านการเกษตรในแขนงต่างๆ เพื่อออกแบบ และผลิตหุ่นยนต์สำหรับทำการเกษตรด้วยระบบอัตโนมัติ
หุ่นยนต์ 3 มิติ (3D RoboFarmer) สำหรับการเกษตรแบบผสมผสานด้วยความแม่นยำสูง มีความสามารถในการทำการเกษตรได้อย่างหลากหลาย ตั้งแต่ขั้นตอนการเตรียมดิน การเพาะปลูก การรดน้ำ กำจัดวัชพืช และการเก็บเกี่ยว ช่วยลดการใช้แรงงาน ลดปริมาณการใช้น้ำ ปุ๋ย-สารเคมี ขณะเดียวกันก็ช่วยพัฒนาประสิทธิภาพการเพาะปลูกและเพิ่มผลผลิต ก่อให้เกิดการลดรายจ่ายและเพิ่มรายได้อย่างมีนัยยะสำคัญ

อาจารย์ปัญญา ออกแบบหุ่นยนต์ให้สามารถเคลื่อนไหวได้ในปริภูมิสามมิติ (3D Space) โดยใช้เทคโนโลยีการประมวลผลภาพ (Image Processing) ทำงานกับระบบปัญญาประดิษฐ์ (Artificial Intelligence : AI) ทำให้หุ่นยนต์สามารถวิเคราะห์ข้อมูลประมวลผล และตอบสนองต่อการทำงานได้อย่างทันท่วงที (Real-Time) ช่วยเพิ่มประสิทธิภาพในการทำเกษตรให้ดียิ่งขึ้น
3D RoboFarmer
ลองมาทำความรู้จักกับหน้าตาของหุ่นยนต์ 3D RoboFarmer รุ่นต้นแบบขนาดเล็กกันสักหน่อย ในเบื้องต้น อาจารย์ปัญญาและทีมงานได้ช่วยกันพัฒนาหุ่นยนต์ 3 มิติ ต้นแบบ รุ่นต้นแบบขนาดเล็ก ตั้งแต่เดือนกันยายน 2560 บน platform เครน ซึ่งสามารถลดขนาด มาเป็นหุ่นล้อ ติดแผงโซลาร์เซลล์ได้ในอนาคต

หุ่นยนต์ 3 มิติ ประกอบด้วย โครงสร้างเป็นเครนเหล็กรูปตัวยู (อาจารย์ปัญญา บอกว่า คล้ายเครนในท่าเทียบเรือ) สูง 7 เมตร ยาว 18 เมตร ตัวเครนติดล้อขนาดเล็ก ทำงานเคลื่อนที่ด้วยระบบราง มีแรงเสียดทานต่ำ ทำงานด้วยระบบซอฟต์แวร์ ประกอบด้วย ระบบควบคุม ระบบเทคโนโลยีสมองกลอัจฉริยะ แบบ Machine Learning ระบบสั่งงานผ่านเครือข่ายอินเตอร์เน็ต พร้อมตั้งโปรแกรมควบคุมระบบอัตโนมัติ
อาจารย์ปัญญา ออกแบบให้เครนสามารถยกตัวสูงขึ้นเรื่อยๆ ได้ ตามการเติบโตของพืช ทำได้แม้แต่การเตรียมดิน ทำได้ทุกอย่าง สามารถสั่งงานให้หุ่นยนต์เคลื่อนที่ได้ในแนวราบ ซ้าย-ขวา หน้า-หลัง และทำงานในแนวดิ่ง ขึ้น-ลง หุ่นยนต์มีระบบเซ็นเซอร์ ตรวจเช็กระยะการเจริญเติบโตของพืช ตรวจเช็กสภาพดินฟ้าอากาศ ความชื้น ให้ปุ๋ย ให้น้ำ เก็บเกี่ยวผลผลิตได้ตลอด 24 ชั่วโมง ปัจจุบันอาจารย์ปัญญาได้สร้างเครนของหุ่นยนต์ 3 มิติ ไว้ที่ภาควิชาวิศวกรรมเกษตร กำแพงแสน และในอนาคตวางแผนติดตั้งเพิ่มอีก 2 จุด ที่ศูนย์วิทยาศาสตร์ข้าว และโรงเรียนชาวนา ข้างกรมการข้าว
“สาเหตุที่ผมทำหุ่นยนต์เป็นเครนขนาดใหญ่ วางบนราง จุดหลักเพื่อต้องการให้นักวิจัยใช้ทำงานเก็บข้อมูล วิเคราะห์ผลได้สะดวก เพราะเมืองไทยยังไม่มีการทำ Model ทางคณิตศาสตร์ความสัมพันธ์กัน ระหว่างข้อมูลความต้องการของพืช (Crop Requirement) กับสิ่งแวดล้อมที่แปรปรวน จะต้องควบคุมชดเชยต่อความแปรปรวนของสิ่งแวดล้อม (ภาวะอากาศ ความชื้น แสง น้ำ อุณหภูมิ) ด้วยวิธีการที่แม่นยำสูงของ Precision Agriculture ซึ่งคำตอบอยู่ที่ Robotic ครับ” อาจารย์ปัญญา กล่าว
สไปเดอร์บอท

ช่วงเดือนมกราคม 2562 ที่ผ่านมา อาจารย์ปัญญาและทีมงานได้ช่วยพัฒนาต่อยอดงานวิจัยหุ่นยนต์ 3 มิติ รุ่นที่สอง เรียกว่า “สไปเดอร์บอท” ได้แนวคิดการพัฒนามาจากรูปแบบการใช้กล้องถ่ายทอดสดในสนามฟุตบอล อาจารย์ปัญญา จึงนำไอเดียดังกล่าวมาประยุกต์ต่อยอดใช้ในภาคเกษตร ยุค 4.0 สไปเดอร์บอทสามารถทำงานปลูกดูแลพืชได้จนถึงการเก็บเกี่ยว
อาจารย์ปัญญา ได้นำ “สไปเดอร์บอท” มาจัดแสดงเป็นครั้งแรกใน “งานวันเกษตรแห่งชาติ หรืองานเกษตรแฟร์” ระหว่าง วันที่ 25 มกราคม-2 กุมภาพันธ์ 2562 ณ อาคารจักรพันธ์เพ็ญศิริ มหาวิทยาลัยเกษตรศาสตร์ บางเขน ภายใต้แนวคิด “เกษตรศาสตร์นำไทย นวัตกรรมก้าวไกล ใส่ใจสิ่งแวดล้อม”
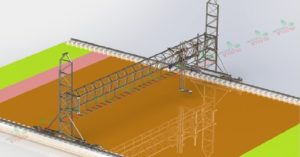
“สไปเดอร์บอท” จะลอยตัวอยู่กลางอากาศ เคลื่อนไหวด้วยระบบสลิงยาว 300 เมตร ที่ขึงติดกับเสาหลักทั้งหมด 4 เสา บนพื้นที่ 600 เมตร เสาแต่ละต้นติดตั้งแผงวงจรไฟฟ้าสำหรับใช้ควบคุมการทำงานของสไปเดอร์บอทเคลื่อนที่ไหวไป-มา ตัวสไปเดอร์บอทติดตั้งแขนกลที่สามารถยืดขึ้นลงได้ ปลายแขนกลสามารถติดตั้งอุปกรณ์เก็บเกี่ยวผลผลิตหรืออุปกรณ์ให้น้ำ ให้ปุ๋ย หรือหยอดเมล็ดพันธุ์ได้ตามต้องการ
สไปเดอร์บอท ถูกควบคุมและสั่งการด้วยระบบคอมพิวเตอร์ ทั้งนี้ เกษตรกรสามารถสั่งงานสไปเดอร์บอทให้ทำงานในไร่นา พืชไร่ พืชสวน ได้จากระบบแอปพลิเคชั่นบนโทรศัพท์ อาจารย์ปัญญา บอกว่า สไปเดอร์บอทสามารถดูแลจัดการแปลงปลูกพืชได้มากกว่า 3 ไร่ หากพื้นที่เพาะปลูกกว้างมากกว่านี้ แค่ตั้งเสาเพิ่มก็สามารถขยายความยาวของสายสลิงให้สไปเดอร์บอททำงานได้มากขึ้นตามความต้องการ
ข้อดีของหุ่นยนต์ 3 มิติ คือช่วยลดปัญหาขาดแคลนแรงงานภาคเกษตร ลดต้นทุนการผลิต เพราะหุ่นยนต์สามารถทำงานด้วยความแม่นยำตลอด 24 ชั่วโมง เก็บวิเคราะห์ด้วยเทคโนโลยีสมองกลอัจฉริยะ โดยเก็บข้อมูลจากไร่นาส่งผ่านจากเกษตรกรไปถึงนักวิจัย นำไปสู่การสร้างฐานข้อมูลการเกษตรขนาดใหญ่ (Big Data) ซึ่งนักวิจัยสามารถนำข้อมูลจริงจากไร่นาเกษตรกรนำมาปรับปรุงแก้ไขเพื่อพัฒนาระบบการผลิตสินค้าเกษตรสู่ความแม่นยำสูงเพิ่มมากขึ้นในอนาคต

ในอนาคต สามารถพัฒนาหุ่นยนต์ตัวเล็ก ติดล้อ วิ่งในแปลง ที่สามารถแก้ปัญหาได้แบบ Precision กันเลยครับ โดยเฉพาะการเกษตรแบบอินทรีย์ เป็นที่ต้องการมากเลย ซึ่งเทคโนโลยีหุ่นยนต์ 3 มิติ สามารถตอบคำถามได้หมด โดยเฉพาะปัญหาขาดแคลนแรงงานภาคเกษตร เพราะต่อไปจะมีหุ่นยนต์มาใช้ทดแทน สารเคมีกำจัดวัชพืช โรคและแมลงต่อไปจะใช้แต่น้อย ใช้แค่พอเพียงและใช้อย่างมีประสิทธิภาพ
ที่ผ่านมา เครื่องจักรในภาคเกษตรของไทยส่วนใหญ่จะอิงกับระบบรถแทรกเตอร์ ซึ่งเน้นใช้กับพืชเชิงเดี่ยวมากกว่า แถมมีปัญหาเรื่องน้ำหนัก ทำให้ดินในไร่นากลายเป็นดินดานแข็งกระด้าง และทำให้ดินเป็นหล่มได้ การปลูกพืชผสมผสาน จะดูแลตลอดอายุของพืชแต่ละชนิดได้ลำบาก และพืชมีอายุการเก็บเกี่ยวที่ไม่เท่ากัน ต้องใช้เครื่องมือที่แตกต่างกันมากมาย ใช้รถเก็บเกี่ยววิ่งไปก็ติดขัด ชนกับต้นอื่นๆ ที่ยังไม่ถึงอายุเก็บเกี่ยว นี่คือ ปัญหาของการใช้เครื่องจักรสำหรับเกษตรผสมผสาน
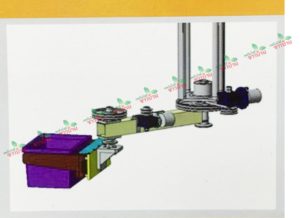
“แต่อุปกรณ์หุ่นยนต์ 3 มิติ ของผมพัฒนาสำหรับใช้เพาะปลูกพืชแบบผสมผสาน เรียกได้ว่าอุปกรณ์ตัวนี้เป็นเครื่องแรกของโลกเลย เพราะหุ่นยนต์ทำงานด้วยระบบเครน หรือใช้สลิงจะไม่สัมผัสกับพื้นดิน หุ่นยนต์มีขนาดเล็ก สามารถทำงานในแปลงไร่นา พืชไร่ พืชสวนได้อย่างมีประสิทธิภาพ สามารถประยุกต์ใช้งานกับพืชได้หลากหลายชนิด CNC เป็นเครน XZY อยู่บนแปลงเกษตร เมื่อต้องการใช้งาน แค่เปลี่ยนหัวอุปกรณ์ที่แกน Z เท่านั้น เช่น อุปกรณ์หัวเจาะ หัวพรวนดิน อุปกรณ์ให้น้ำเฉพาะจุด หัวเก็บเกี่ยวพืชได้ร้อยชนิด เรียกว่า ต้องการใช้งานประเภทใด ก็เพียงแค่เปลี่ยนหัวอุปกรณ์เพียงอย่างเดียว หุ่นยนต์ก็ทำงานได้ทั้งวันทั้งคืน” อาจารย์ปัญญา กล่าว
ก้าวให้ทันโลก AI
อาจารย์ปัญญา กล่าวว่า ปัจจุบันรัฐบาลจีนตั้งนโยบายพัฒนาประเทศสู่ “China 5.0” โดยตั้งเป้าพัฒนาประเทศจีนให้กลายเป็นผู้นำด้านเทคโนโลยี AI ของโลก ไม่ใช่แค่ผู้นำด้านการผลิตจำนวนมาก ขายราคาถูก อย่างที่เรารับรู้กันอีกต่อไป สิ่งสำคัญที่ทำให้จีนน่าจะได้เปรียบการพัฒนาด้าน AI กว่าชาติตะวันตกคือ ข้อมูล เพราะรัฐบาลจีนเก็บข้อมูลแทบทุกอย่างจากประชาชนทุกคน รวมถึงรัฐวิสาหกิจและบริษัทเอกชนทุกแห่ง หัวใจสำคัญของการฝึก AI คือต้องมีข้อมูลมาป้อนให้ AI ได้เรียนรู้มากๆ และบ่อยๆ แต่กับโลกตะวันตกนั้นกฎหมายการใช้ข้อมูลนั้นค่อนค้างรัดกุมกว่าจีนมาก กลายเป็นปัญหาสำคัญมากขึ้นทุกวันแล้ว ดังนั้น จึงกลายเป็นจุดได้เปรียบของจีน ด้าน AI ตั้งแต่เริ่มเกม
สำหรับเทคโนโลยี AI ที่มหาวิทยาลัยเกษตรศาสตร์กำลังทำอยู่ ก็วางแผนจัดหนัก มีหลายฟังก์ชั่น เช่น ข้อมูลการเตรียมดิน ใส่ปุ๋ย ให้น้ำแบบแม่นยำ การปลูก เก็บเกี่ยว ดูแล ตรวจวัดด้วยระบบ Sensor Fusion เช่น ความชื้นในดิน อากาศ ค่าธาตุอาหารในดิน อุณหภูมิในแปลง แสงแดด รวมถึงค่าพยากรณ์อากาศจากกรมอุตุนิยมวิทยา ข้อมูลน้ำจากกรมชลประทาน
“นวัตกรรม AI ของมหาวิทยาลัยเกษตรศาสตร์ เป็น machine learning มีระบบกล้อง CCTV, RGB, NIR ถ้ามีเงินทุนมากพอก็จัดเป็น Hyperspectral ตรวจวัดการดูดกลืนแสงได้หลายย่านความถี่ เพื่อสร้าง model ทำนายค่าต่างๆ ในทางภูมิศาสตร์ พืช ปุ๋ย โรค แมลง ระบบนี้สามารถปลูกพืชและดูแลพืชตลอดอายุได้หลายชนิด ได้ตลอด 24 ชั่วโมง ทั้งใช้ในระบบโรงเรือนแบบปิด หรือกลางแจ้งระบบเปิดคือแปลงเกษตรทั่วไปเลย นวัตกรรมนี้มีประโยชน์ต่องานวิจัยด้านพืชทุกชนิด นวัตกรรมรูปแบบนี้เป็น platform ที่นำไปพัฒนาต่อยอดได้หลากหลายมาก” อาจารย์ปัญญา กล่าว
ผู้สนใจสามารถติดตามรายละเอียดหุ่นยนต์ 3 มิติ สำหรับการเกษตรแบบผสมผสานด้วยความแม่นยำสูง ได้ที่ http://www.Facebook.com/3DRoboFarmer หากมีข้อสงสัยประการใด สามารถติดต่อสอบถามกับ อาจารย์ปัญญา เหล่าอนันต์ธนา ได้ทางอีเมล : [email protected] หรือทางโทรศัพท์ 02-797-0999 ต่อ 1524




